Пороговая обработка изображений следов дефектов
Сегментация изображения, т.е. разделение его на области, для которых выполняется определенный критерий, проводится на основе его пороговой обработки по яркости (бинаризации). Операция порогового разделения заключается в сопоставлении значения яркости каждого пикселя изображения с заданным значением порога. Выбор соответствующего значения пороговой величины дает возможность выделения на изображении областей определенного вида.
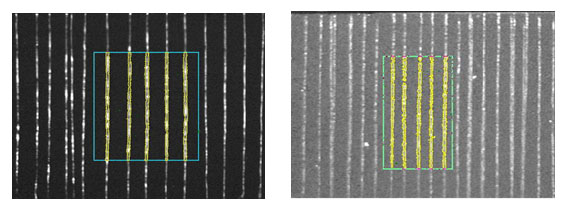
Компьютерная модель изображения индикаторного рисунка дефекта на контролируемой поверхности
В процессе бинаризации исходное полутоновое изображение, имеющее N уровней яркости, преобразуется в черно-белое, пиксели которого имеют только два значения – 0 и 1. Поскольку количество информации в бинарном изображении почти на порядок меньше, чем в исходном полутоновом изображении, то бинарное изображение легче обрабатывать, хранить и т.п.
Изображение в памяти персонального компьютера представляет собой матрицу точек, яркость которых соответствует яркости наблюдаемого изображения, а размер такой матрицы соответствует размеру изображения. Допустимый диапазон значений яркости отдельной точки (пикселя) изображения: 0 – 255, причем белому цвету соответствует уровень яркости 255, а черному – 0. Это справедливо в случае полутонового изображения с глубиной цвета 8 бит.
Пороговое (бинарное) изображение получается из исходного из следующего соотношения:

где r(x, y) и s(x, y) – уровни яркости пикселей изображения, L – пороговый уровень по яркости.
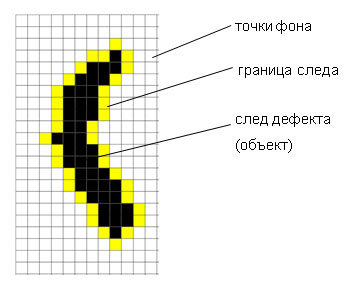
Таким образом, на изображении r(x, y) пиксели со значением, равным единице, относятся к объектам (в случае капиллярного контроля – это индикаторные следы дефектов), в то время как точки со значением, равным нулю, относятся к фону.
Пороговая обработка индикаторных рисунков дефектов
Для проведения эффективной сегментации изображений индикаторных рисунков с неоднородным фоном предлагается подход, при котором исходное изображение разбивается на подобласти так, что в пределах каждой из них уровень яркости фона остается приблизительно равномерным.
Если в случае глобальных методов для вычисления порога анализируется гистограмма всего изображения, то при локальных методах порогового преобразования исследуются гистограммы фрагментов изображения. В каждой из таких подобластей для сегментации используется свое локальное значение порога. Поскольку порог, применимый для каждого пикселя, оказывается зависящим от характеристик подобласти изображения, содержащей данный пиксель, такое пороговое преобразование является адаптивным.
Исходное изображение разбивается на m x n прямоугольных фрагментов: m по вертикали и n по горизонтали. От их размера зависит чувствительность метода к перепадам яркости фона. С одной стороны, желательно уменьшить размер фрагментов, чтобы хорошо обрабатывать достаточно резкие перепады яркости фона (например, пятна), но, с другой стороны, при уменьшении размера фрагментов появляется опасность, что элементы индикаторных рисунков будут приняты за фон, и появятся их искажения.
В каждом конкретном случае количество и размер прямоугольных элементов, на которые разбивается исходное изображение, выбирается экспериментально. В качестве критерия здесь можно использовать значения дисперсии уровней яркости пикселей, принадлежащих одной области разбиения.